近日,公司杨澜教授团队在自动驾驶与人工智能领域取得重要研究进展,最新研究成果《EE-RL: Vision Language Guided Reinforcement Learning with Explorer and Expert Model for End-to-End Autonomous Driving》被人工智能领域顶级国际会议IEEE/CVF Conference on Computer Vision and Pattern Recognition(CVPR 2026)主会正式录用。论文第一署名单位为美加墨世界杯官网,公司2024级硕士生李小龙为论文第一作者,杨澜教授为共同第一作者,房山老师为通讯作者,研究工作由美加墨世界杯官网联合浪潮(北京)电子信息产业有限公司和清华大学共同完成。
CVPR是全球人工智能领域最具影响力的国际学术会议之一,被中国计算机学会(CCF)列为A类会议。本届CVPR大会将于2026年6月3日至6月7日在美国丹佛举行。会议共收到论文投稿16092篇,最终录用4090篇,整体录取率约25.42%。该研究成果的成功录用,充分展示了公司在计算机与人工智能前沿方向的科研积累与创新水平,也体现了公司在研究生创新人才培养方面的良好成效。
论文简介:针对端到端自动驾驶模型在稀疏关键场景下面临的性能衰退与鲁棒性不足等问题,论文提出一种探索者-专家强化学习(EE-RL)的端到端自动驾驶框架。该方法通过协同基于强化学习的探索者与经微调的视觉语言大模型(VLM)专家,实现对常规驾驶场景与稀疏关键场景的联合建模与高效学习,并引入双经验回放缓冲区提升策略优化效果。同时,建立StateHash相似度评估机制,以衡量图像与运动学状态的一致性,从而跳过冗余的VLM推理过程,显著提高训练效率。通过CARLA Leaderboard基准的大量实验结果表明,EE-RL在性能上显著优于现有的SOTA方法。在Town03场景中,EE-RL的驾驶得分和违规得分分别提升19.82%和20.98%,并在闯红灯等高风险场景下实现了零事故发生。此外,在泛化城市场景Town05和Town06中,EE-RL取得了80.09的平均驾驶得分。实验结果充分验证了该方法在应对稀疏关键场景方面的显著优势,以及其良好的鲁棒性与泛化能力。
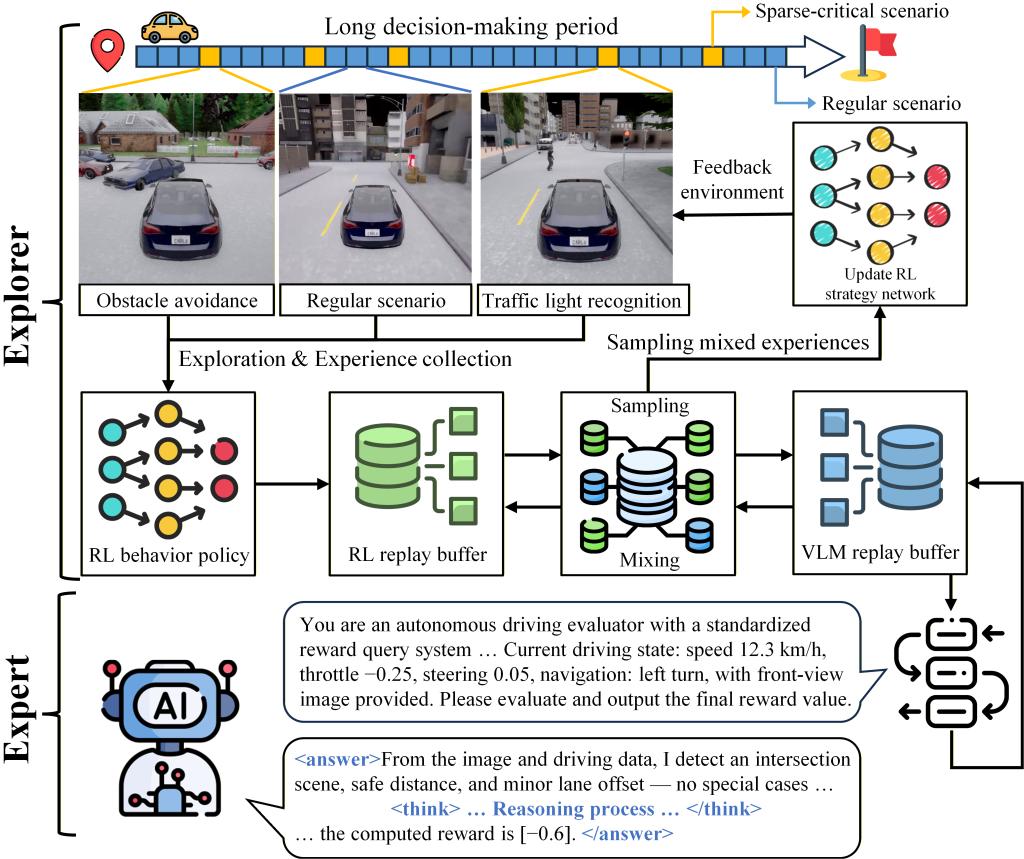
研究整体框架


 EN
EN
